Պորտ |
Քանակ * 1, Q-տանկով |
|
Ռոբոտ |
Քանակ * 1, շեղողական փոխանցումի համար |
|
ՀCLU |
Քանակ * 1, ավտոմատ բեռնում և դուրս բեռնում շեղողականների համար |
|
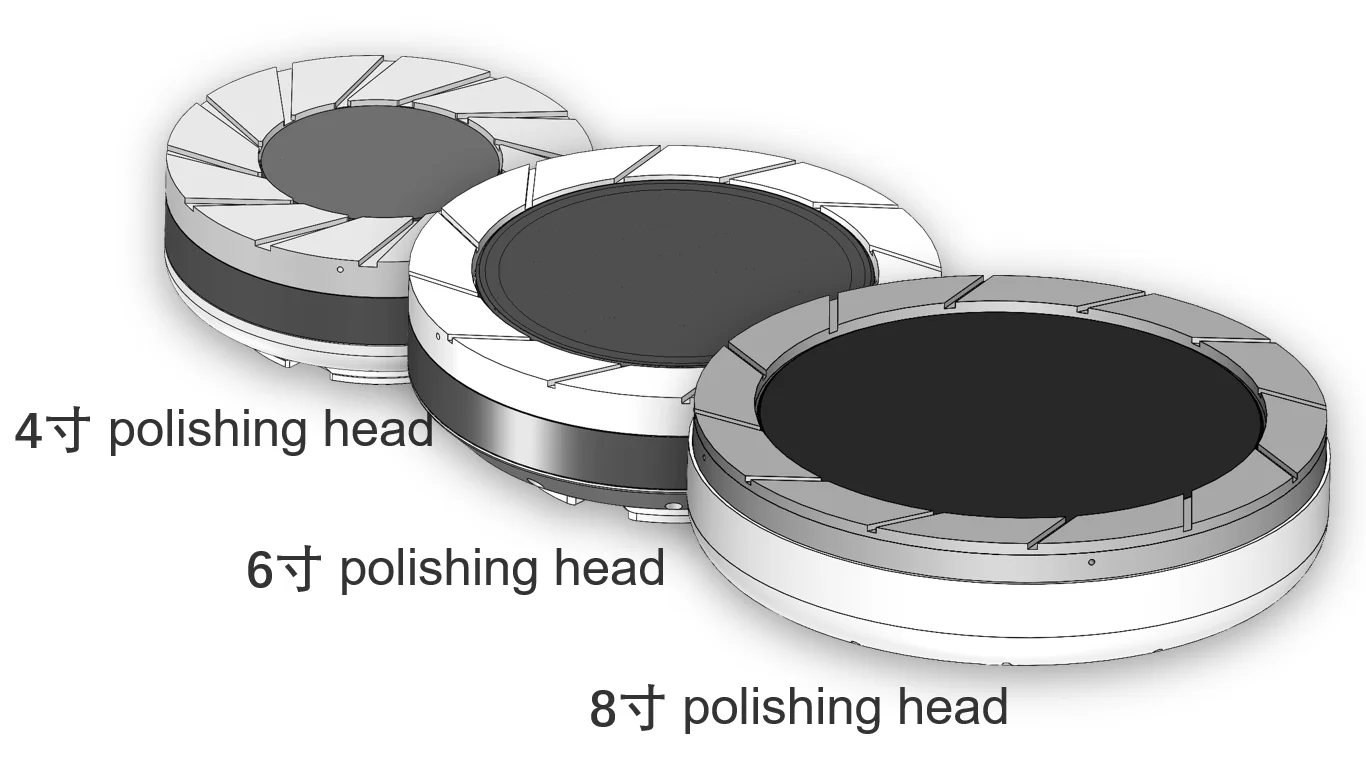
Լեզվագիտական գլուխ |
Քանակ * 13 սենյակի կառավարում, կառավարման ճշգրտություն 0.1PSI, կարող է սպասել 400-1200 ՄԻԿՐՈՄԵՏՐ շեղողականների գործողություններ։ |
|
Երկարացնող գլխի արագություն |
5-150RPM |
|
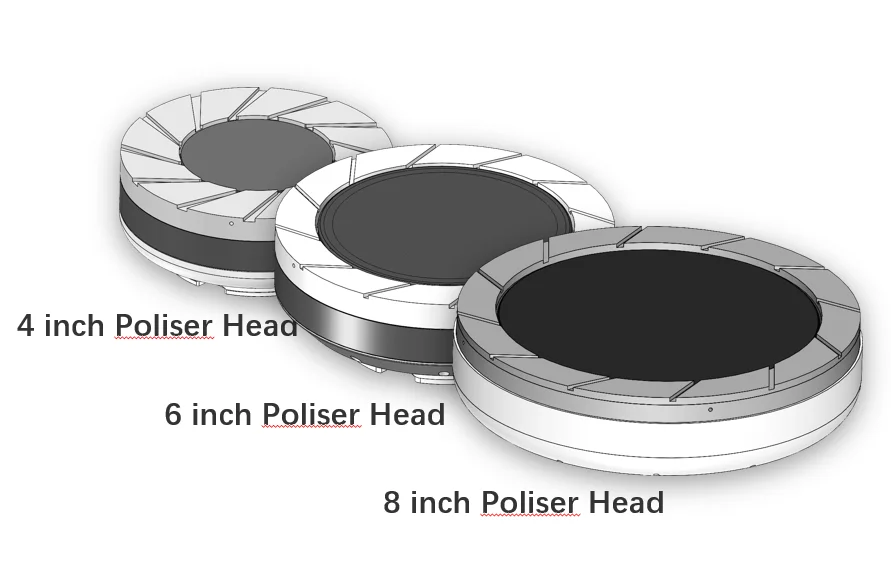
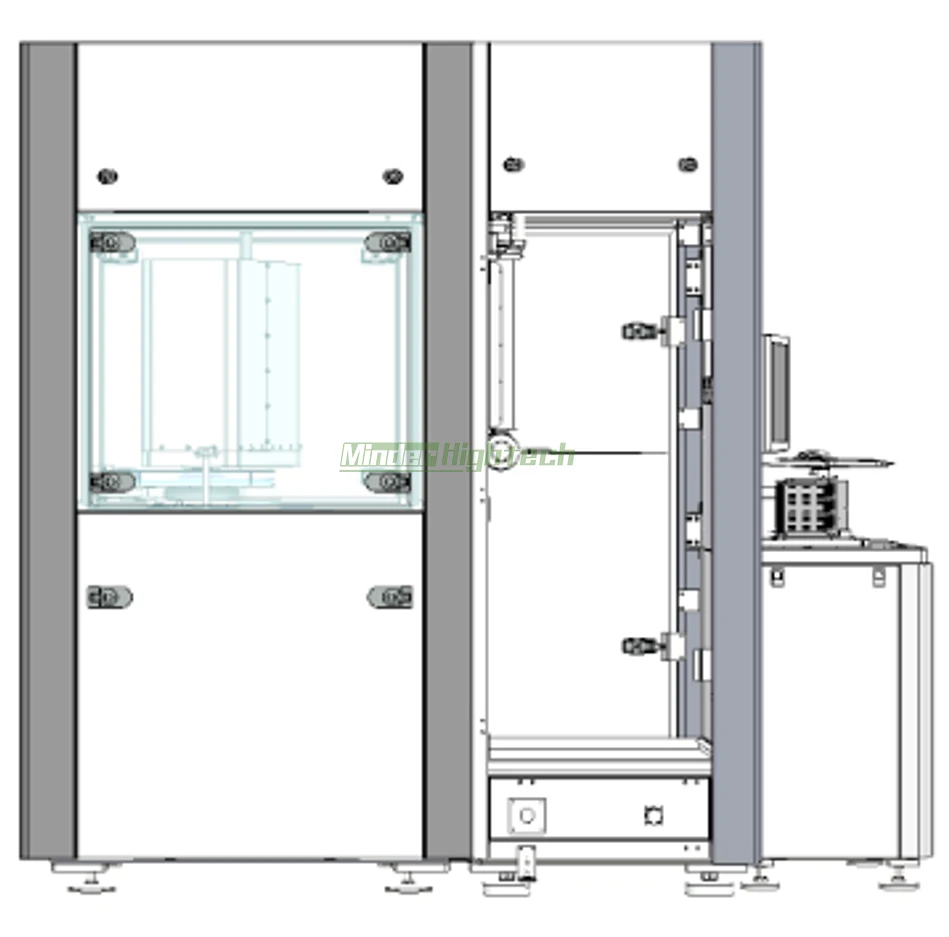
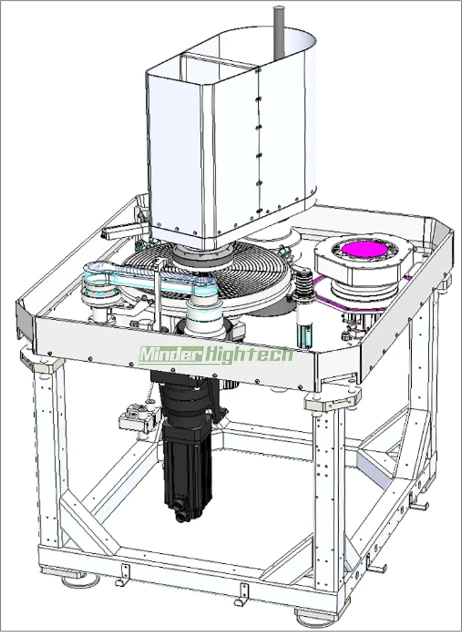
Փայլեցնող սկավառակ |
Քանակ * 1 Երկարացնող Դիսկի Ծավալ 508մմ, Երկարացնող Պադի Արագություն 10-150rpm. |
|
Կտրելու ձեռնարկ |
Քանակ * 1 երկարացնող պադ։ Երկարացնող պադը կարող է երկարացնել oline (համատեղ) կամ offline (երկարացման հետո)։ Կտրելու ձեռնարկը հավաքված է կտրելու առանցքով, որը կարող է պտտվել և շարժվել վերև և ներքև, իսկ արագությունը և ներքև ճնշումը կարող է կառավարվել։ Կտրելու գործիքը տեղադրված է կտրելու առանցքի վրա և կարող է արագորեն հանվել։ Երկարացնող պադի տարբեր տիպերին համապատասխան, տարբեր տիպերի համաձայնոցների գործիքներ են տեղադրված, ներառյալ համաձայնոցների սուրներ, արարող օղակներ և արարող դիսկեր։ |
|
UPA երկարացնող գլխի օդի ճնշումի կառավարման միավոր |
Քանակ * 13 ZONE կարգավորելի է լավագույն մակերևույթի հարթացման արդյունքի համար |
|
Լեզվացման հեղուկի սպառող качուն |
Քանակ * 2. Պերիստալտիկ качուններ օգտագործվում են հեղուկի սպառման համար, կարգավորված են 2 պերիստալտիկ качուններ՝ տարբեր լեզվացման հեղուկներ տալու համար լեզվացման շրջանակին։ Յուրաքանչյուր качուն կարող է օգտագործվել պրոցեսի ցանկացած քայլում։ հեղուկներ տալու համար լեզվացման շրջանակին։ Յուրաքանչյուր качուն կարող է օգտագործվել պրոցեսի ցանկացած քայլում։ |
|
Սլարի ձեռն |
Քանակ * 1-ը կարող է կառավարել սլարի նախատեսված կետը և կարող է լցնել լեզվացման պադը։ |
|
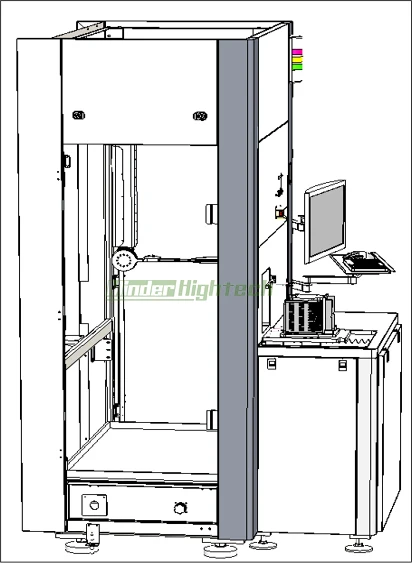
Օպերացիոն կառավարման համակարգը կարող է իրականացնել օգտագործողի մակարդակի կառավարում, օրինակ՝ օպերատորի โրդ, պահուստի ուղղություն և տեխնիկական ուղղություն, և տարբեր ուղղությունները կառավարվում են գաղտնաբառերով։ Համակարգի սոֆտվերը կարող է խմբագրել պրոցեսի յուրաքանչյուր քայլի պրոցեսային պարամետրերը և հարթացնել և լեզվացնել սենսորի մակերևույթի փաթեթը պրոգրամմին համաձայն։ Կարող է հետադարձ կապով մոնիտոր արարած սարքերի պարամետրերը, և սոֆտվերը կարող է ավտոմատ պահել տարբեր պրոցեսային տվյալներ։ Արտակարգ կանգնում կարգավորված է լեզվացնել սենսորի մակերևույթի փաթեթը պրոգրամմին համաձայն։ Կարող է հետադարձ կապով մոնիտոր արարած սարքերի պարամետրերը, և սոֆտվերը կարող է ավտոմատ պահել տարբեր պրոցեսային տվյալներ։ Արտակարգ կանգնում կարգավորված է պրոցեսային տվյալներ։ Արտակարգ կանգնում կարգավորված է կոճակ, որը օգտագործվում է նպատակահայտ դրությունից դուրս գալու և կատարել կառավարման էլեկտրական ուժի սահք։ |
||


Guangzhou Minder-Hightech Co.,Ltd.
Copyright © Guangzhou Minder-Hightech Co.,Ltd. All Rights Reserved
 EN
EN AR
AR
 BG
BG
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 IT
IT
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 LT
LT
 SR
SR
 SL
SL
 UK
UK
 VI
VI
 ET
ET
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 GA
GA
 IS
IS
 HY
HY
 AZ
AZ
 KA
KA