תנאים של המכשיר |
||
מארחת המכשיר |
||
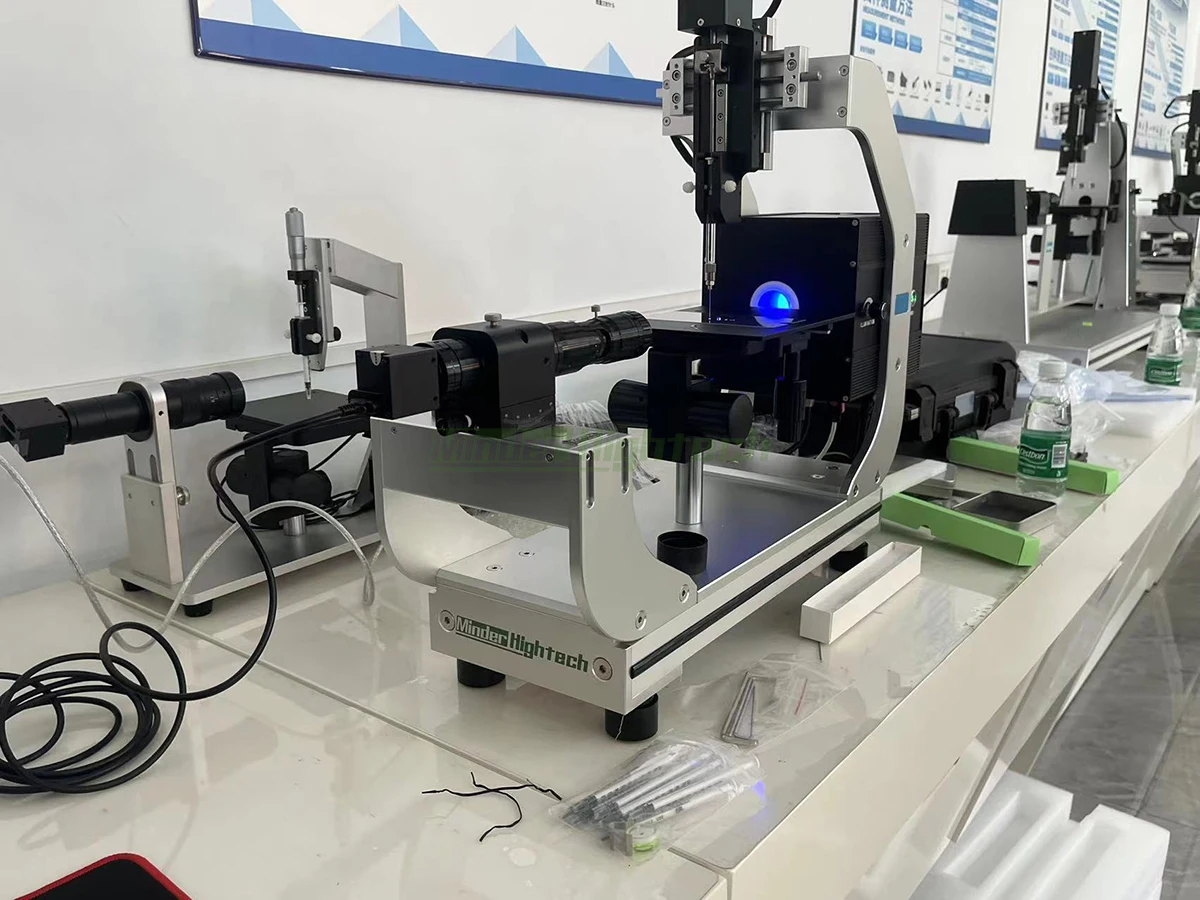
מימדים חיצוניים |
760 מ"מ (אורך) 380 מ"מ (רוחב) 700 מ"מ (גובה) |
|
משקל |
21 ק"ג |
|
התאמה-adjustment |
מבחן/הערכה ברמה של מכונה מלאה |
|
מקור |
||
מתח |
100~240VAC |
|
כוח |
150W |
|
תדירות |
50/60HZ |
|
חלל |
||
גודל פלטפורמה |
130mm×170mm |
|
מדגם מרבי |
260×∞×15mm |
|
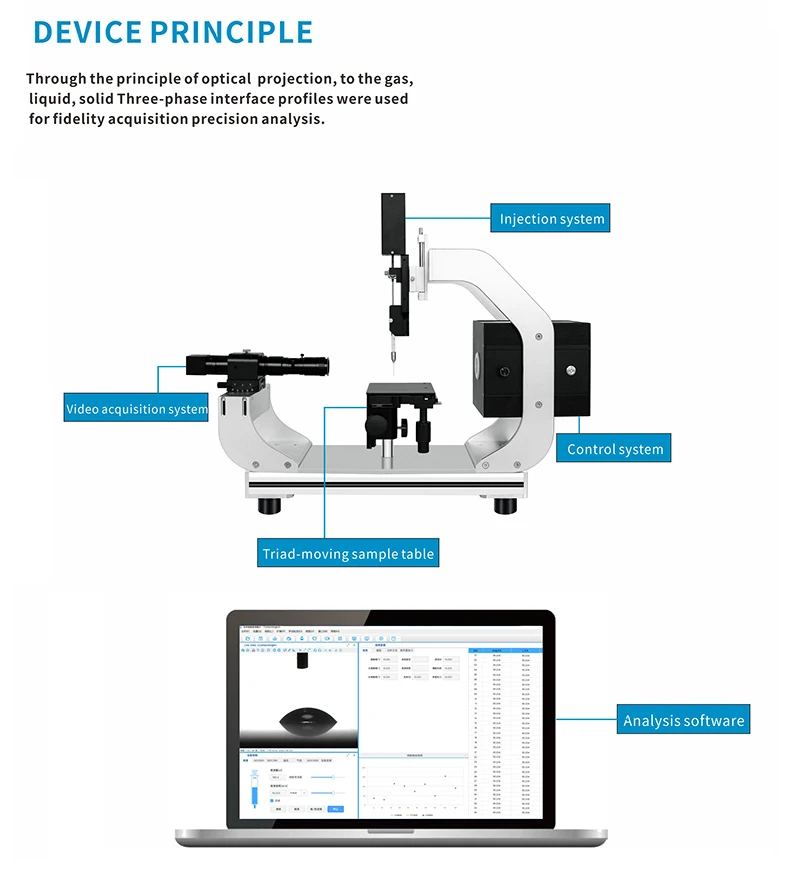
תיקון שולחן מדגמים |
פלטפורמה ניידת אוטומטית לחלוטין |
|
העתקת ידנית לפני ואחרי, מסלול 180mm, דיוק 0.1mm העתקת ידנית ימין ושמאל, מסלול 120mm, דיוק 0.1mm העתקת ידנית למעלה ולמטה, מסלול 20mm, דיוק 0.1mm |
||
מערכת איסוף תמונות |
||
תמונת מקסימום |
5000(H)× 4000(V) |
|
קצב מסך מקסימלי |
200 תקופות בשנייה (נדרג לתקופות גבוה יותר) |
|
חיישן |
SONY 1/1.8" |
|
ספק אור |
שחור ולבן / צבע |
|
רווחי השקעה |
מוגדר על ידי המשתמש |
|
הצגת רוחב קו |
מוגדר על ידי המשתמש |
|
זמן חשיפה |
מוגדר על ידי המשתמש |
|
מקור |
המערכת 5-VDC USB |
|
העברוב |
USB3 Vision |
|
ראש מיקרוסקופ |
||
מרחק מוקד |
130 מ"מ ± 5 מ"מ (העתקת זום) |
|
כפולה |
10 פעמים |
|
היפוך נקודת מבט |
±10° |
|
הקטנת אקלוזיה |
4~14מיקרון |
|
تنظורת מערכת איסוף |
למעלה / למעלה / שטוח |
|
מerchant אור |
||
סוּג |
LED תעשייתי בודד גל (אור קר) |
|
אורך גל |
470nm |
|
שדה אור |
φ50mm |
|
נקודה מאורית |
96 גרעין מוקד |
|
אורך חיים |
50000 שעה |
|
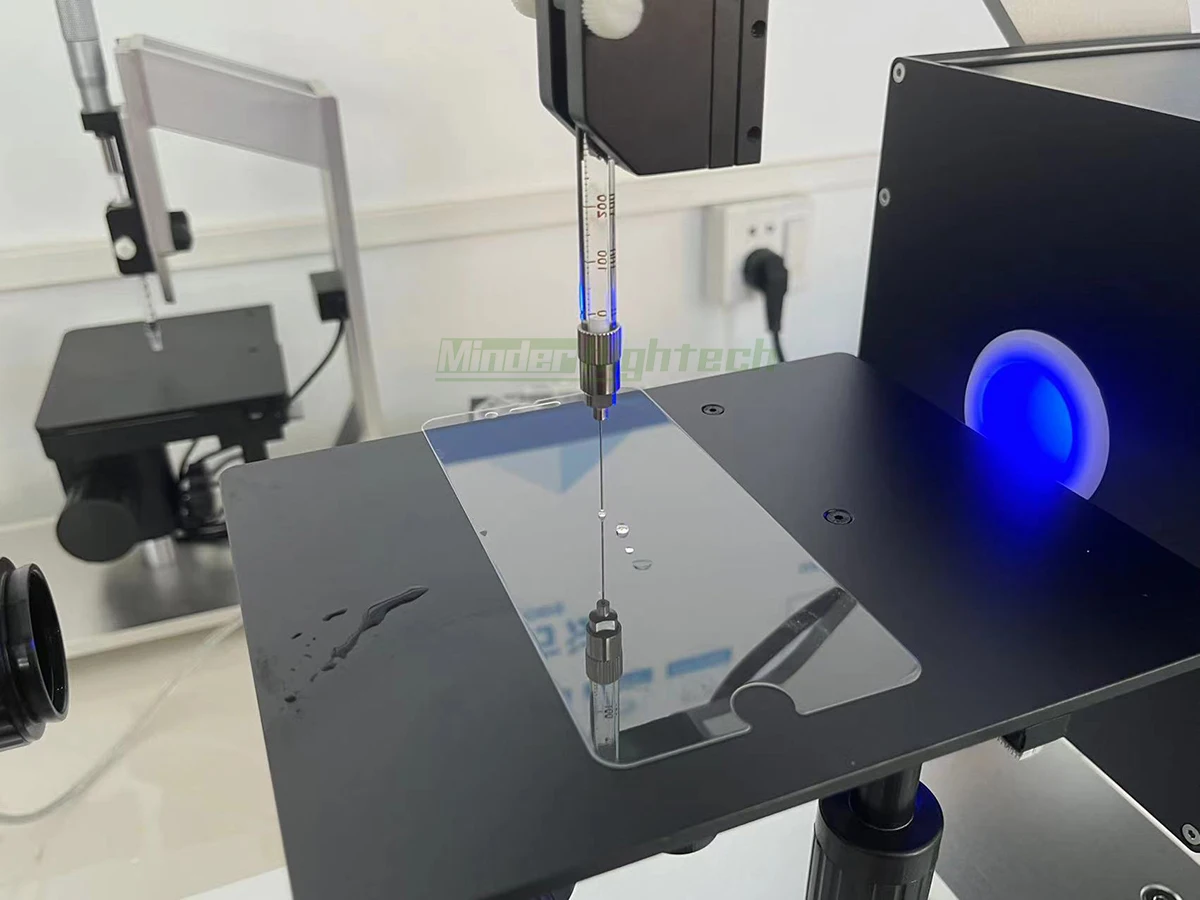
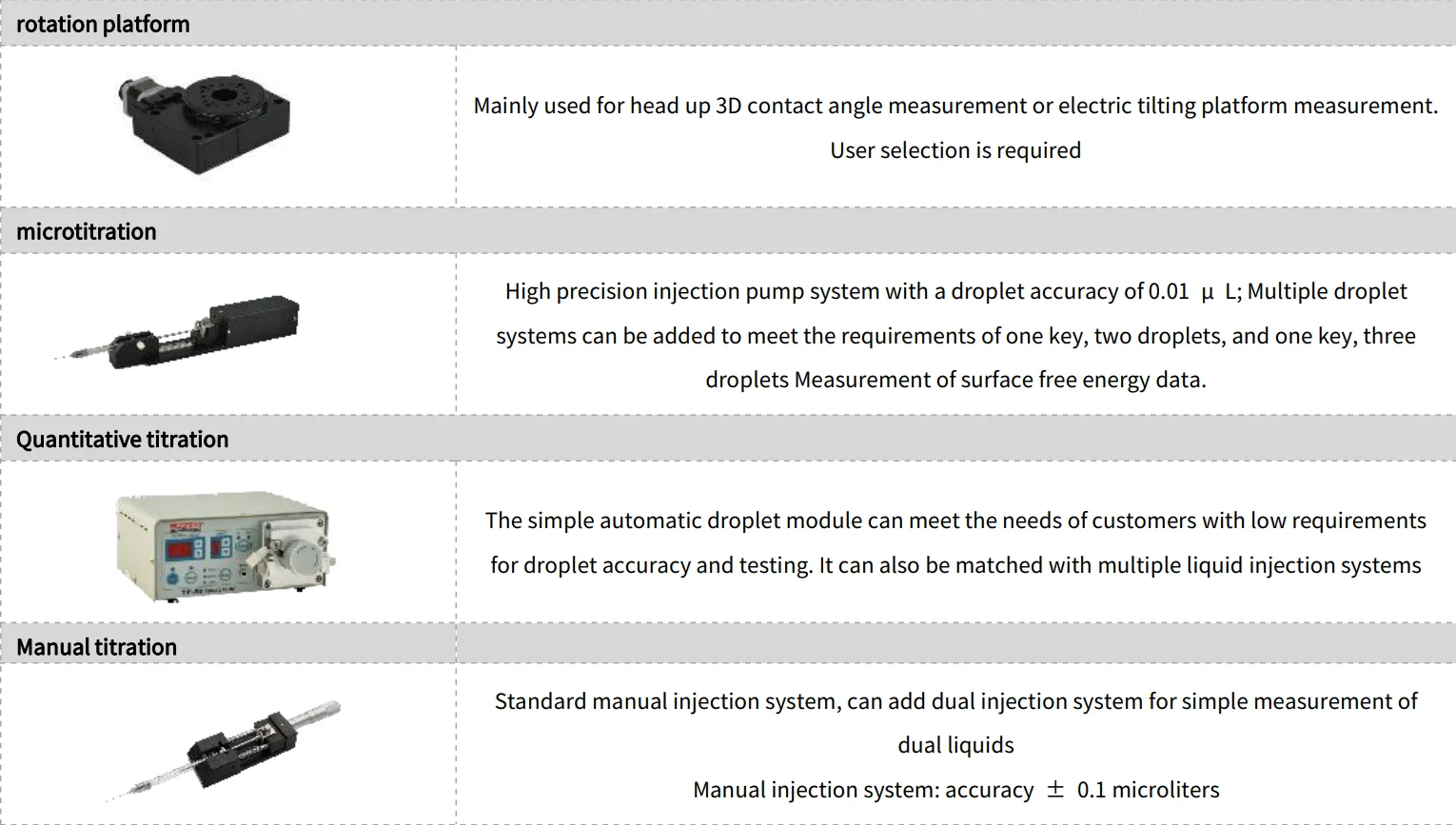
מערכת הזרקה |
||
שיטת נפילה |
מזרק מיקרו דקיק |
|
שיטת בקרה |
בקר דיגיטליITAL digital |
|
דיוק נפילה |
0.01μl |
|
מזרק |
סירוג סגור אוויר דיוק גבוה |
|
שיטה של חיבור נוזלי |
בקר מנוע דיוק |
|
מזרק |
סירוג סגור אוויר דיוק גבוה |
|
קיבולת |
100 μ l \/ 500 μ l \/ 1000 μ l (התקן 500 μ l) |
|
ראש מחט |
מחט סופר-הידרופובית מברזל חלוף גודל 0.51 מ"מ (התקן) |
|
מהירות |
1μL\min ~2000μL\min |
|
תוכנה |
||
טווח של זווית מגע |
0~180° |
|
יחס רזולוציה |
0.01° |
|
מדידה אוטומטית |
פונקציית מדידה של לחצן אחד אוטומטית (נקודה של בדיקה תכנותית, מדידה אוטומטית מרובת נקודות) |
|
כמות נתוני מקסימום |
ניתוח בלחיצה אחת של > 10 ערכים מספריים |
|
ספקטרים מורפיים |
מפת ספקטרום של נתוני המורפולוגיה הדו-מימדית |
|
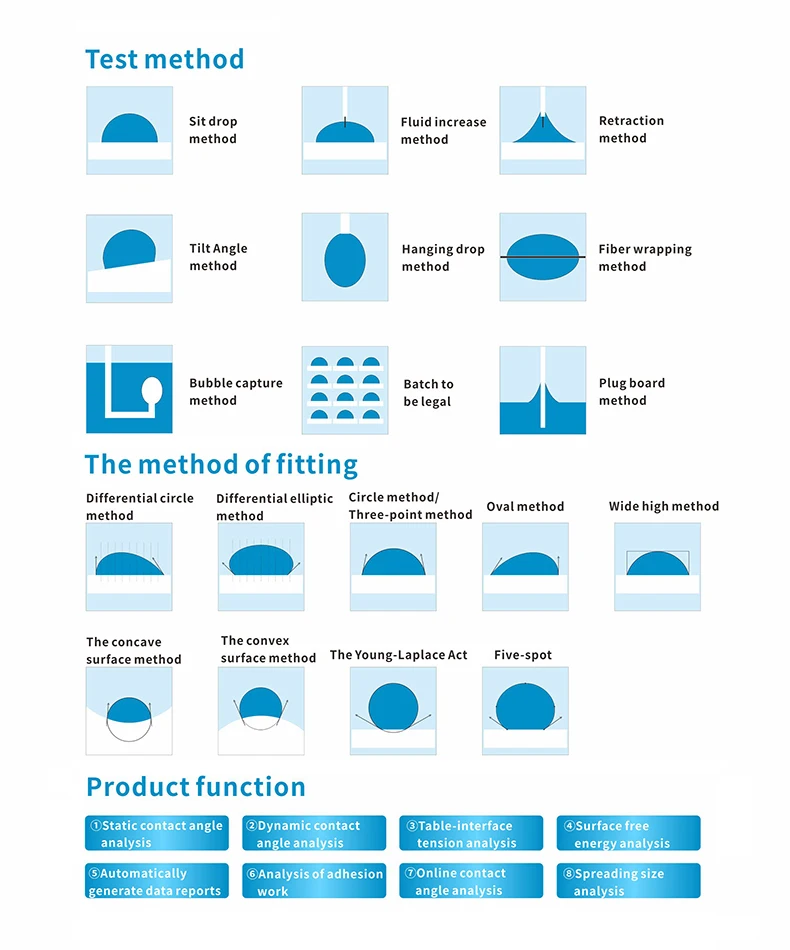
שיטת מדידת זווית ההגעה |
עבודה אוטומטית לחלוטין, חצי אוטומטית וידנית |
|
מצב ניתוח |
שיטת שיטת תלייה, שיטת עצירת טיפות (מצב 2/3), שיטת포착 gelels, שיטת ירידה של מושב, שיטת מחט פין, שיטת לוח הכנסה שיטה |
|
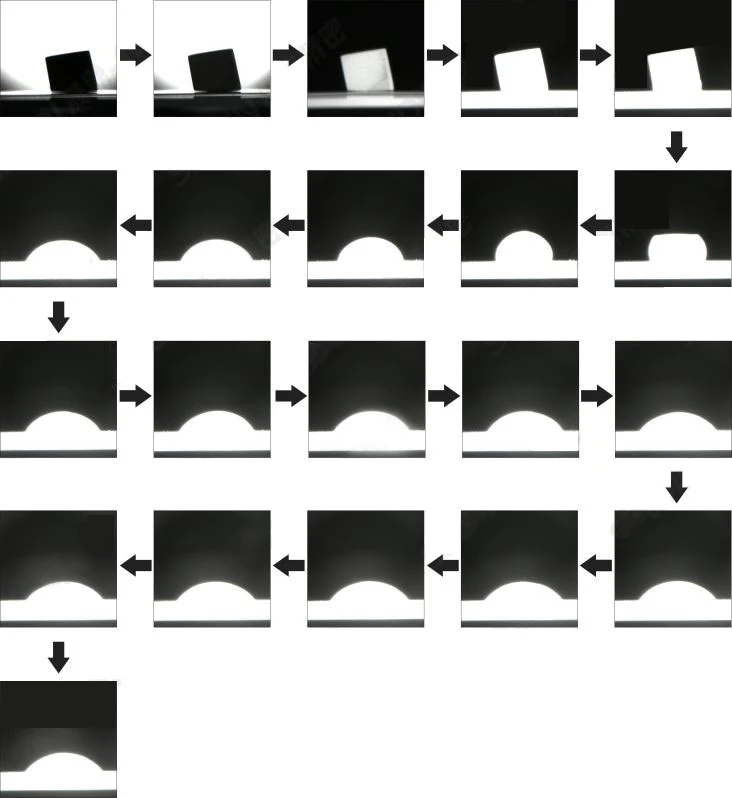
תהליך ניתוח |
ניתוח סטטי, ניתוח דינמי של הרחבה אוטומטית של נוזל, ניתוח דינמי של ריסון, ניתוח בזמן אמת, ניתוח דו-צדדי, ניתוח זווית קדימה ואחורה |
|
שיטת בדיקה |
שיטה מעגלית, שיטת אליפסה / אליפסה מוטה, שיטת מעגל דיפרנציאלי / אליפסה דיפרנציאלית, Young-Laplace, רוחב ו גובה שיטה, שיטת משיק, שיטת תחום |
|
מבחן לחץ / ממשק |
||
תנאי בדיקה |
0~3000mN/m |
|
יחס רזולוציה |
0.01 mN/m |
|
מצב מדידת מתח |
אוטומציה מלאה |
|
מצב ניתוח |
שיטת תقطיט gele, שיטת טיפה תלוייה וספקטרוגרם בזמן אמת |
|
אנרגיהnergie חופשית של השטח |
||
שיטת בדיקה |
Zisman, OWRK, WU, WU 2, Fowkes, Antonow, Berthelot, EOS, עבודה של הדבקה, עבודה של שקיעה, ומקדם התפשטות |
|
טיפול בנתונים |
||
שיטת פלט |
ייצור אוטומטי, ניתן לייצא / להדפיס את EXCEL, Word, ספקטרוגרם ופורמטים אחרים של דוחות |
|


Guangzhou Minder-Hightech Co.,Ltd.
Copyright © Guangzhou Minder-Hightech Co.,Ltd. All Rights Reserved
 EN
EN AR
AR
 BG
BG
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 IT
IT
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 LT
LT
 SR
SR
 SL
SL
 UK
UK
 VI
VI
 ET
ET
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 GA
GA
 IS
IS
 HY
HY
 AZ
AZ
 KA
KA